

Why Humanoid Robots Don't Fall Over
The Magic of Kinematic Redundancy

That feeling of simplicity you get from watching a humanoid robot is an illusion.
The fluid grace of its movements masks a brutal engineering challenge. Today, we’re solving one of the hardest: kinematic redundancy. It’s the secret that allows robots to manage multiple tasks at once, and it all hinges on a mathematical concept called the null space.
The Core Problem: Too Many Ways to Move
To understand the problem, compare a simple crane to a human arm.
A toy crane has three joints: up/down, left/right, and open/close the claw. For the claw to reach any specific point, there is only one correct configuration for those three joints.
Now, look at your own arm. You have your shoulder, elbow, and wrist. To touch a cup on a table, you have infinite choices. You can keep your elbow straight, bend it up, or bend it down. The task is simple, but your arm has more joints than it strictly needs to accomplish it. This surplus of movement is called kinematic redundancy.
For a robot, this is a computational nightmare. The command “move your hand one inch forward” has infinite mathematical solutions. The computer must solve an inverse problem—what joint movements create the desired hand movement—and with infinite answers, it has no way to choose. Without a method to decide, the system paralyzes itself.
The Solution: A Hierarchy of Tasks
We solve this by giving the robot a prioritized list of commands, not just one.
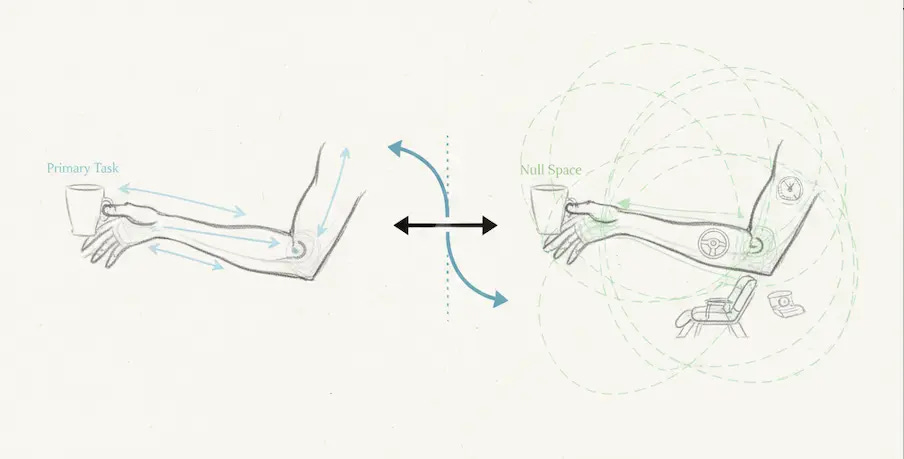
The Primary Task is the main job. It is non-negotiable and must be completed perfectly.
Example: Move the hand to these exact coordinates.
Secondary Tasks are the “side quests.” They use the extra, redundant joints to make the movement safer and more efficient. But how can the robot work on these without interfering with its primary goal? This is where the null space comes in.
How It Works: The Power of the Null Space
In simple terms, the null space is the set of all internal joint movements that result in zero movement for the primary task. It’s the robot’s freedom to wiggle internally without affecting the job it’s being paid to do.
Think of the robot’s body as a car, and its hand as the steering wheel.
Your Primary Task: “Drive the car 5 feet forward.”
The Robot’s Joints: The wheels, the steering wheel, the seats, the radio knob, and the rearview mirror.
The Null Space: This is the space of all movements you can make inside the car that have no effect on the car’s 5-foot forward motion. You can adjust the rearview mirror, turn the radio knob, or recline your seat. The car still moves forward exactly 5 feet.
This is exactly how a humanoid robot manages its side quests.
The Safety Side Quest: While the hand moves, the null space allows the elbow to wiggle, ensuring it doesn’t crash into a wall or the robot’s own body. The hand’s path remains unchanged.
The Balance Side Quest: This is critical. Reaching an arm out shifts the robot’s center of mass. Using the null space, the robot can command joints in its torso, spine, or other arm to subtly shift its weight back over its feet, all while the primary task of moving the hand continues uninterrupted.
The mathematical controller acts like a filter. It takes the desired motion for a side quest and strips away any part of it that would interfere with the primary task. The result is a “safe” motion that happens entirely in the background.
Why This Makes Humanoid Robots Possible
The side quests are not optional extras; they are what make the primary task possible. The primary task math might calculate a path that bends a joint past its physical limit or causes the robot to fall over. The primary task only cares about the destination.
The secondary tasks, executed through the null space, ensure the robot gets there without breaking, falling, or hitting anything. They are the unspoken rules that turn a mathematical possibility into a physical reality. This process, called Redundancy Resolution, is what separates a stiff, single-purpose machine from a graceful, intelligent humanoid.
If this breakdown of robotic principles helped you see the field differently, you should join this newsletter.
PS. Ready to build your career in robotics? I help people like you bridge the gap. Let’s start with a conversation. Just hit reply.