

Kinematics vs. Dynamics: The Robotics Terms That Scared Me at First
I once had no idea. Now I teach it to robotics beginners—here’s the simplest breakdown.

When I first joined the Robotics Institute, people kept tossing around the words kinematics and dynamics. Honestly, I had no idea what they actually meant. I figured they had something to do with robot motion, but the details? A complete mystery.
It wasn’t until I sat through the infamous KDC class—Kinematics, Dynamics, and Controls—that it finally clicked. These weren’t just fancy words. They were the building blocks of how robots move.
So let’s break them down the way I wish someone had explained them to me on day one.
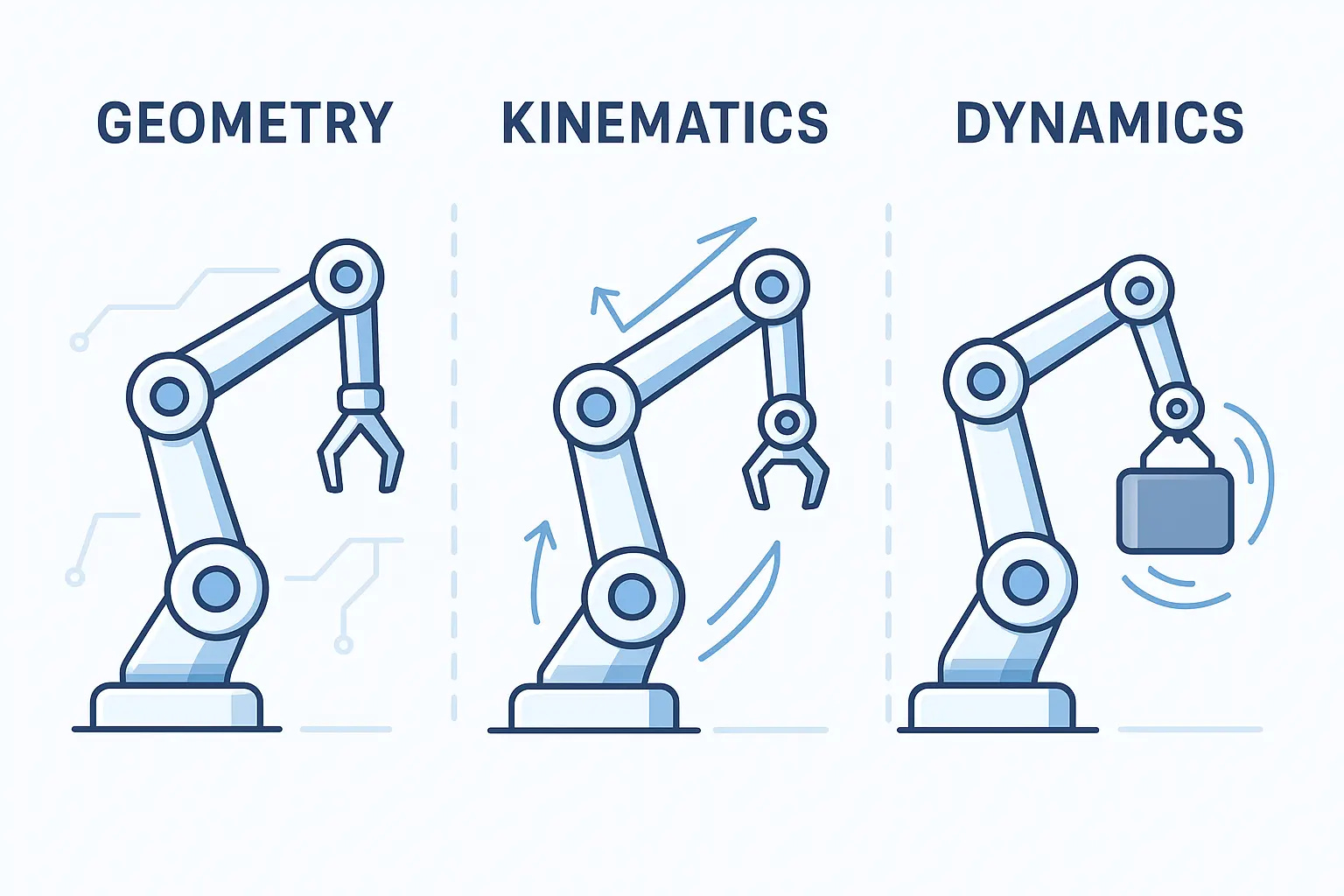
Geometry: The Starting Point
We all know geometry. It’s the math of shapes, angles, and positions.
Picture this: you’re standing on the street looking up at a building. Tilt your head back 30 degrees, measure how far you are from the building, and you can calculate its height using basic trigonometry. High school stuff.
Robotics starts in the same place. If a robot arm has a few joints frozen in place, you can use geometry to figure out where the tip of the arm ends up. No movement, just positions in space.
But here’s the problem. The real world doesn’t stay still.
Kinematics: Adding Motion
The moment you add movement, geometry alone isn’t enough. You need to bring time into the equations. That’s where kinematics comes in.
Kinematics is geometry plus motion. Instead of just describing where the robot arm is, you describe how it’s moving. If the joints of the arm rotate at certain speeds, kinematics tells you how fast the tip of the arm moves.
And here’s a fun twist. Often, you know where you want the tip of the arm to be (say, welding a car door or placing a component). The challenge is figuring out how to move the joints to get there. That problem is called inverse kinematics. And trust me, it’s a lot trickier.
Dynamics: The Weight of Reality
Kinematics is fine if you’re just simulating on a computer. But the real world has mass, and mass brings momentum.
If a robot arm is swinging a heavy tool, you can’t just stop it on a dime. If a drone is zipping through the air, it doesn’t freeze in place the moment you let off the controls. Physics won’t allow it.
Dynamics is where you add mass and forces to the picture. It tells you not only how things move, but why they move the way they do.
So should we always use dynamics for robots? In theory, yes. But in practice, no. If your robot is light, slow, or doesn’t move much, kinematics often gets the job done. The errors are manageable, and the math stays simpler.
Models and Tradeoffs
Geometry, kinematics, dynamics—they’re all just models of reality. Equations trying to capture how the world works.
No model is perfect. They all come with errors. The art of robotics is knowing when the simple model is “good enough,” and when you need the full complexity of dynamics to avoid failure.
That judgment call is what separates a robot that works in theory from one that works in the real world.
If you enjoyed this breakdown, subscribe to BuildRobotz so you don’t miss future posts.