

Four Radically Different Solutions That make Wall-Climbing Robots Possible
Why defying gravity cannot be one invention, but four entirely different solutions

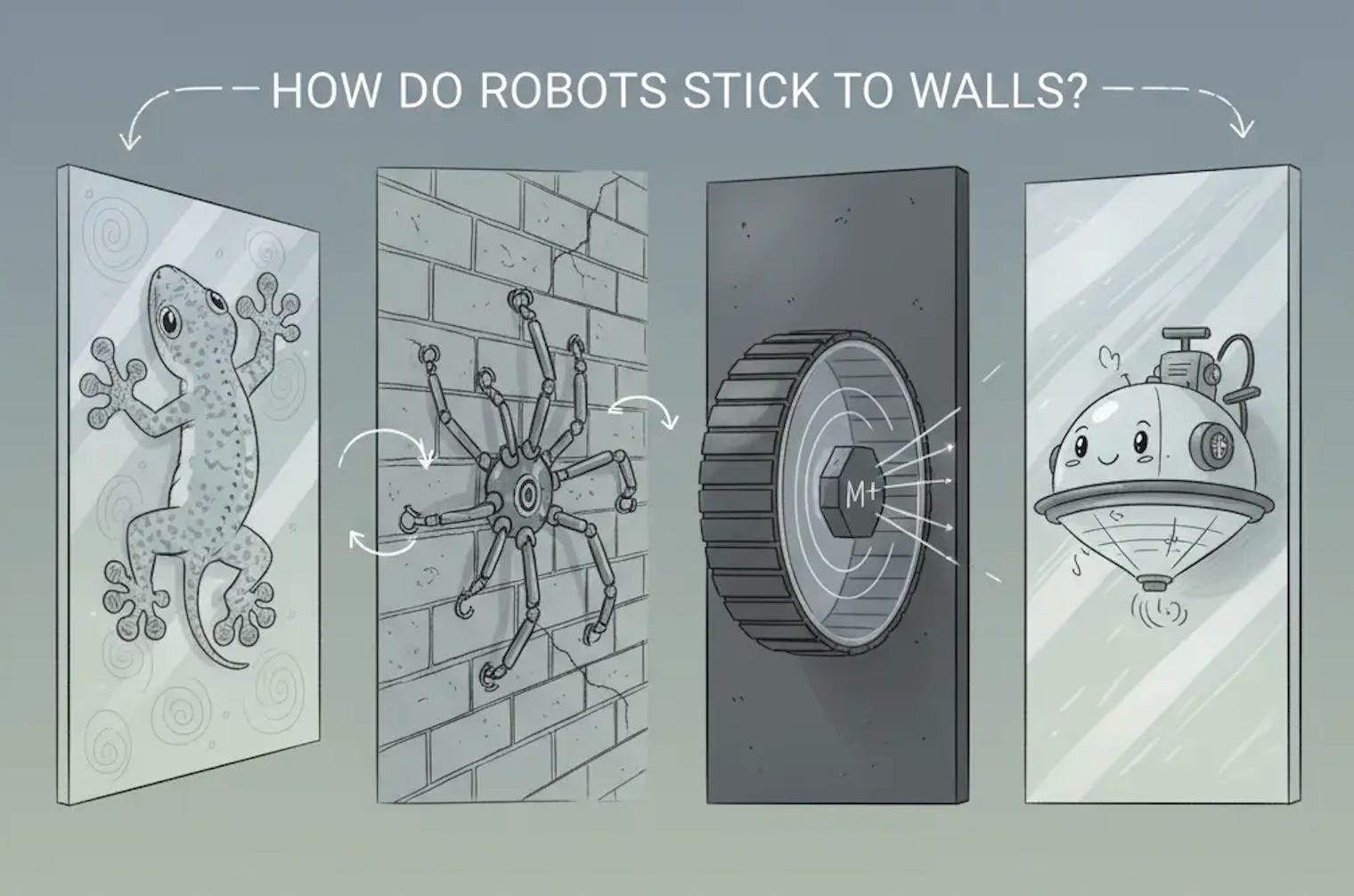
Wall-climbing robots defy gravity, and their power to stick seems like pure science fiction. The real magic isn’t one secret ingredient, but four distinct engineering solutions, each precision-designed to handle a different kind of wall. Some techniques use everyday solutions, like magnetic and suction that everyone is familiar with, and others use forces that we don’t deal with everyday, like van der Waals forces or microspine hooks.
The simple fact is, the wall always tells the robot how to stick. Let’s dive into the four primary ways robots conquer a vertical surface.
The Gecko Effect: Climbing with Atomic Forces
Have you ever seen a gecko run straight up a glass window? They aren’t covered in tape or glue. They are using pure physics in a way that feels like science fiction: dry adhesion.
The adhesion force here comes from van der Waals forces. Don’t let the name scare you; it’s just the weak, natural attraction between atoms. Every atom in the universe is slightly attracted to every other atom, but this force is only noticeable when surfaces are extremely close.
A robot mimicking a gecko’s foot is covered in millions of microscopic, hair-like structures called setae. When these tiny hairs press against a smooth surface, they get so close to the wall’s atoms that those millions of weak attractions add up to one massive, powerful grip. It’s like having a billion tiny, weak magnets—individually useless, but together, they can hold a car!
This method is brilliant for clean, smooth surfaces, and it uses zero energy to maintain the stick. The robot releases the grip by simply changing the angle of the foot, peeling those atomic hairs off the surface, one tiny bit at a time.
The Spider Grip: Anchoring to Rough Surfaces
If you take a gecko bot to a rough brick wall or concrete pillar, those lovely atomic forces fail completely because dirt and roughness keep the sticky hairs too far away from the wall’s atoms.
This is where the second exotic solution comes in: micro-spines.
Think of a rock climber using a hook. This technique completely ignores atomic forces and focuses instead on mechanical interlocking. The robot’s foot is equipped with hundreds of sharp, strong, tiny metal hooks or spikes. When the robot presses its foot onto a seemingly smooth surface, those micro-spines hunt for the microscopic dips, cracks, and grooves that cover even hard concrete.
Once the foot is pressed down, the sharp tips snag and interlock with the texture of the wall. When the robot lifts its body, the hooks are firmly anchored, keeping the robot attached. This is perfect for rugged, irregular surfaces and is a favorite for robots designed to crawl over weathered industrial pipes or concrete walls.
The Industrial Standard: Focused Magnetic Power

When the wall you need to climb is made of steel—like a ship hull, a storage tank, or a large bridge—there is no need for fancy hairs or hooks. You use a time-tested, familiar power: magnetism.
The challenge here is that magnetic wheels have a tiny contact patch—just a thin line on the wall. How can a small area provide enough force to hold a heavy inspection robot and its gear?
The answer is magnetic flux concentration.
Engineers don’t just bolt a magnet onto a wheel. They design a complex magnetic circuit inside the wheel using powerful Neodymium magnets and a steel yoke. This yoke acts like a funnel, forcing the magnetic field lines to exit the magnet and intensely focus their power into that tiny area where the wheel touches the steel wall. This specialized design multiplies the holding power, ensuring the adhesion force is far greater than the robot’s weight.
Combine that massive downward pull with a high-friction rubber tread, and you get a reliable workhorse capable of carrying heavy tools up a vertical steel slab.
The Everyday Solution: The Power of Low Pressure
Finally, we have the most common solution you’ve seen since you were a kid playing with toys: suction, or negative pressure adhesion.
This technique works by creating an air-tight seal against the wall, often with flexible cups or a large vacuum chamber. A pump then sucks the air out from the sealed area. Because the air pressure outside the seal is now much higher than the pressure inside, the external air pushes the cup firmly against the wall.
Suction is excellent because it works on many non-ferrous surfaces—glass, smooth painted metal, plastic, or marble. The biggest weakness, however, is rough surfaces. If the surface isn’t smooth enough, the air seal leaks, and the robot loses its grip, leading to a very sudden, very dramatic failure.
The complexity of climbing robots isn’t in their ability to move, but their specialized ability to stick.
Next time you see a robot scaling a tower or crawling on a bridge, you’ll know it’s not using a simple trick. It’s using physics—whether atomic, mechanical, or magnetic—to solve a specific engineering problem tailored perfectly to the surface beneath its feet.
I hope this deep dive into the four types of adhesion gave you some insight into the ingenious engineering behind these machines. If you enjoy breaking down complex robotics into clear, high-impact lessons, you’ll want to get every issue of BuildRobotz delivered straight to your inbox. There’s so much more to discover, and we are just getting started!
P.S. If this post sparked an idea or you’re wondering how to take the first step toward a career in robotics, reply to this email! I can help guide you through the maze of mentorship, resources, and next moves.